自動運転 - 自己位置推定
Autonomous Driving - Self-Localization
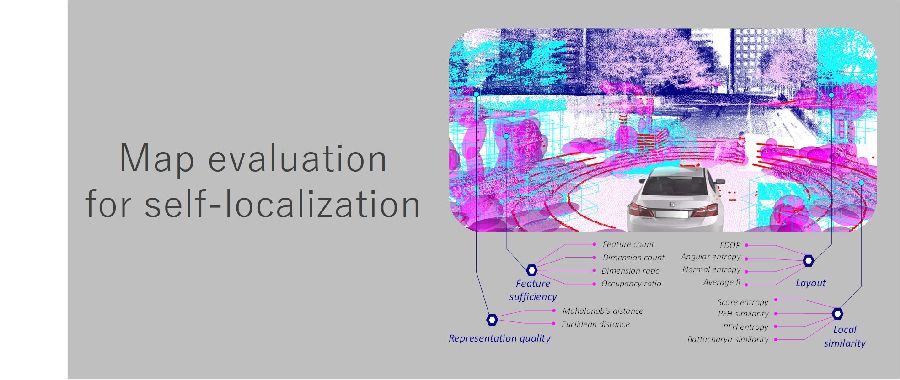
自動運転タスクに対し事前情報を提供するHDマップは近年注目されています. HDマップベースの自己位置推定は自動運転にとって重要な技術ですが, その性能は実環境下における動的な障害物によって引き起こされるオクルージョンの影響を大きく受けます. 本論文では都市部において安定した自己位置推定を行うためにHDマップが必要であることを明らかにすることに焦点を当てています. 実環境下で合成的に生成した障害物とのオクルージョンの影響を比較することで, 新宿では主にそこに位置する障害物が原因で一般的な自己位置推定の手法の性能が大幅に低下することを示します. さらに,ポール状のオブジェクトがHDマップの重要な要素であることを示します.
A high definition (HD) map, which provides prior knowledge to autonomous driving tasks, has been attracted in recent years. An HD map-based self-localization is a crucial technology for autonomous driving, but its accuracy is greatly affected by occlusions caused by dynamic obstacles in real environments. This paper focuses on clarifying the need for HD maps for stable self-localization in highly dynamic environments, especially in an urban canyon. By comparing the effects of occlusion with synthetically generated obstacles in a real environment, we show significant accuracy degradations in a general self-localization method due to obstacles in Shinjuku, Tokyo, Japan. In addition, we reveal that pole-like objects can be vital elements of an HD map to stabilize self-localization accuracy even with many obstacles by evaluating various patterns of high occlusion cases.